Autonomous Area Tracking Robot (ATR)
An autonomous robot that finds available space in difficult-to-reach areas and returns the area.
Overview
Created a Rapid Assembly Design (RAD) projectt for our semester-long design project (SLDP) for our EG-1003 Intro to Engineering Course as a team of 3. The mechnical, electrical, and programming of the code was completed to work as our project design and presented as a final project.
Role
Engineer
Team: JEY
- Jayine Nguyen
- Eric Zheng
Timeline
September 2021 - December 2021
Ideation
Why Autonomous Area Tracking Robot (ATR)?
Demo: Video To Be Uploaded
Development Process & Tools
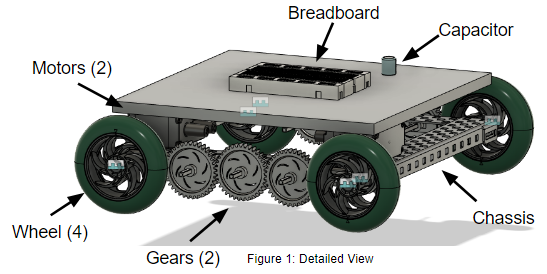
CAD Design Model:
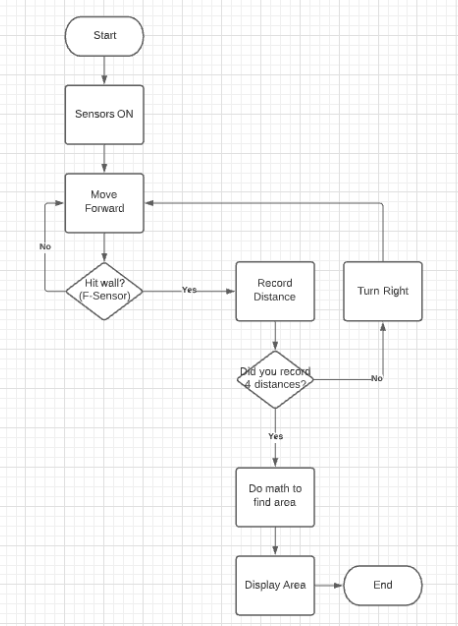
Code Flow Chart:
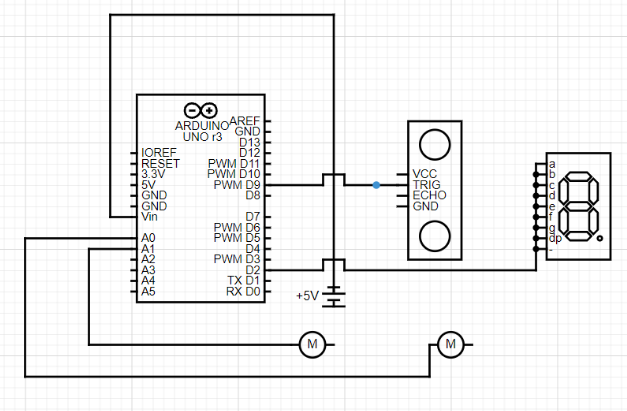
Wiring/Electrical Schematic:
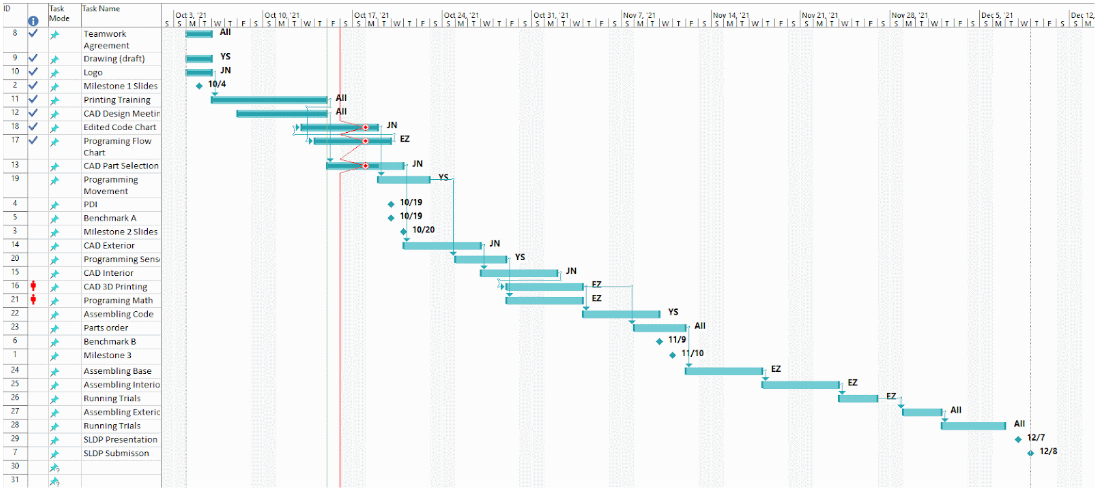
Microsoft Project Schedule:
Physical Components:
- Arduino UNO
- 2 Ultrasonic Sensors
- 1 Gyroscope Sensor
- 2 DC Motors
- Battery
- Breadboard
- Wires
- Robot Chassis
- Wheels (4)
- Axels
- Gears
C++ Code for Arduino UNO Ran on the Arduino IDE
- Gyroscope Code: for rotation and turning corners
- Ultrasonic Code: To measure distance of walls from robot
- Motor code: for locomotion